丂夋憸傪僋儕僢僋偡傞偲奼戝昞帵偝傟傑偡丅
丂奼戝夋憸偐傜偼僽儔僂僓偺乽仼栠傞乿儃僞儞偱栠偭偰偔偩偝偄丅
丂埲慜丄侾侽侽墌廩揹婍偼巊偄暔偵側傜側偄偲彂偒傑偟偨偑丄堦偮丄梡搑傪巚偄偮偒傑偟偨丅
丂偦傟偼庛偭偨揹抮傪廩揹偡傞応崌偱偡丅
丂侾侽侽墌廩揹婍偼廩揹揹棳偑彮側偄偺偱庛偭偨揹抮偵偲偭偰偼桪偟偄偺偱偼側偄偐偲巚偄傑偟偨丅
丂夁曻揹摍偱庛偭偨揹抮傪媫懍廩揹偡傟偽丄偝傜偵僟儊乕僕偑怺偔側傞偺偱偼側偄偱偟傚偆偐丅
丂偨偩偟丄侾侽侽墌廩揹婍偼帺摦掆巭偟側偄偺偱丄恖娫偑巭傔側偗傟偽側傝傑偣傫丅
丂偣傔偰僞僀儅乕偑偁偭偨傜椙偄偺偵偲巚偄傑偟偨偑廩揹婍偺撪晹偵慻傒崬傓偙偲偼崲擄偱偡丅
丂偦偙偱丄侾侽侽墌廩揹婍愱梡偺僞僀儅乕傪嶌偭偰傒傑偟偨丅
丂斈梡偺僞僀儉僗僀僢僠偱傕偁傟偽嶌傞帠偼柍偄偺偱偡偑丄帩偭偰偄側偄偟丄偁偭偨偲偟偰傕堄奜偵巊偄偯傜偐偭偨傝偟傑偡丅
丂巹偼侾侽侽墌廩揹婍傪俈屄峸擖偟丄係屄偼曻揹婍偵夵憿偟偨堊丄僩儔儞僗偼係屄偁傝傑偟偨丅
丂巆傝偺俁屄偺偆偪俀屄偼丄崱夞偺僥乕儅偱偁傞乽偄偨傢傝廩揹婍乿偺堊偵巆偟丄侾屄偼懠偺梡搑偵梊栺偑擖偭偰偄傑偡丅
丂夞楬恾傪僋儕僢僋偡傞偲奼戝昞帵偝傟傑偡丅
丂奼戝恾偐傜杮暥偵栠傞偵偼僽儔僂僓偺仼栠傞杢傪巊梡偟偰偔偩偝偄丅
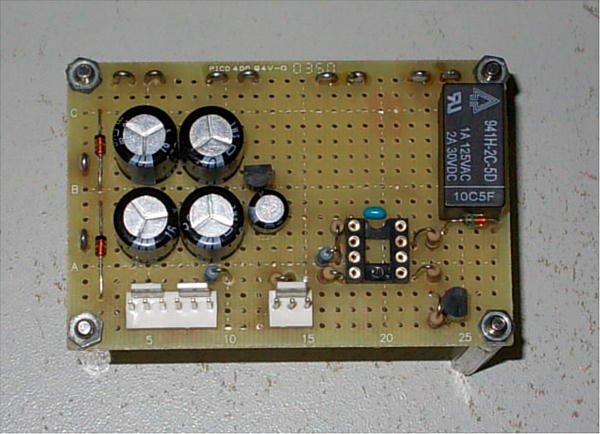
丂憡庤偑侾侽侽墌廩揹婍偱偡偺偱丄嬌娙扨側夞楬偵偟傑偟偨丅
丂揹尮偼侾侽侽墌廩揹婍偐傜奜偟偨僩儔儞僗傪巊偭偨娭學偱攞揹埑惍棳偵側偭偰偄傑偡丅
丂帪娫愝掕偼儃儕儏乕儉偱暘埑偟偨俆倁傪俙乛俢曄姺偟偰偄傞偺偱丄戝嶨攃偱偡丅
丂侽乣栺俀係帪娫偑擖椡偱偒傞傛偆偵側偭偰偄傑偡丅
丂塣揮丄掆巭丄儕僙僢僩偼侾屄偺墴偟杢偱愗傝姺偊傑偡丅
丂揹尮僗僀僢僠偼晅偗偰偁傝傑偣傫丅
丂僞僀儅乕昞帵摂偼僗僞乕僩偱揰柵偟丄僞僀儉傾僢僾偱楢懕揰摂偲側傝丄儕僙僢僩偱徚摂偟偰弶婜忬懺偵栠傝傑偡丅
丂僞僀儉僇僂儞僩拞偵杢傪墴偡偲弶婜忬懺偵栠傝傑偡丅
丂侾侽侽墌廩揹婍傪嵎偟崬傓僐儞僙儞僩偼俀屄丄庢傝晅偗傑偟偨偑摦嶌偼摨帪偱偡丅
丂扨側傞僞僀儅乕偱偡偺偱懠偺梡搑偵傕巊偊傑偡偑丄儕儗乕偺愙揰偑侾俙俀偮傪僷儔愙懕偟偨傕偺丄僸儏乕僘偵侾俙傪擖傟偰偁傝丄
戝偟偨晧壸偼庢傟傑偣傫丅
丂俹俬俠侾俀俥俇俈俆偼戝晹愄偵攦偄偩傔偟偰偍偄偨傕偺偱偡偑丄巊傢側偄撪偵侾俀俥俇俉俁偑弌偨堊丄偙偪傜傪巊偆傛偆偵側傝丄
偝傜偵丄偦偺屻侾俀俥侾俉俀俀偵堏傝傑偟偨丅
丂偦偺堊丄侾俀俥俇俈俆傪巊偆偺偼弶傔偰偩偭偨傝偟傑偡丅
丂侾俀俥侾俉俀俀偲斾妑偡傞偲丄偐側傝尒楎傝偑偟傑偡偑丄摉帪偼俀侽侽墌埵偟偰偄偨偲巚偄傑偡丅
丂婡擻偑彮側偄暘丄僨乕僞僔乕僩傪尒傞偺偼妝偱偡偑丄俽俥俼偺價僢僩偺攝抲偑侾俀俥俇俉俁傗侾俀俥侾俉俀俀偲旝柇偵堘偭偰
偄偰丄拲堄偑昁梫偱偡丅
丂僐儞僷僀儔偼俵倝倠倰倧俠傪巊梡偟傑偟偨丅
丂抁偄僾儘僌儔儉偱偡偺偱丄僜乕僗僼傽僀儖傪傾僢僾偟傑偡丅
丂棙梡偡傞偺偼帺桼偱偡偑丄儊儞僥僫儞僗傗傾僼僞乕僼僅儘乕偼峴偄傑偣傫丅
丂惢嶌偝傟偨応崌偺寢壥偼帺屓愑擟偱偍婅偄偟傑偡丅
/////////////////////////////////////////////
// 侾侽侽墌廩揹婍梡僞僀儅乕 (100yctim.c) //
// 2013/12/11 PIC12F675 //
// MikroC Pro for PIC Ver 6.0.0 //
/////////////////////////////////////////////
// PIC12F675 4MHz INTERNAL
// INTOSC GP4 GP5 = IO, WDT ON, PupTimer ON,
// GP3 = MCLR, BROWN_OUT = ON, CODE_PROTECT OFF,
// DATA CODE PROTECT OFF
typedef unsigned char uchar;
typedef unsigned int uint;
typedef unsigned long ulong;
#define SWITCH GPIO.B5
#define LED GPIO.B4
#define RELAY GPIO.B2
#define READY 0
#define READYtoRUN 1
#define RUN 2
#define RUNtoSTOP 3
#define STOP 4
#define STOPtoREADY 5
volatile uchar state; //僗僥乕僩
volatile uint m_tics; //儈儕俽僇僂儞僞
volatile uint minutes; //暘僇僂儞僞
volatile uchar in_sw; //僠儍僢僞庢傝僇僂儞僞
ulong set_time; //愝掕帪娫
union{ //俙乛俢曄姺抣奿擺
int adw;
char adb[2];
}addata;
void ad_init(void){ //俙乛俢弶婜壔
ADCON0 = 0x81; //塃媗丄VREF=VDD, CH0,
ANSEL = 0x11; //Fosc/8, AN0
}
int ad_conv(void){ //A/D曄姺乮侾俇夞偺暯嬒乯
int i,buff;
buff = 0;
for(i = 0; i < 16; i++){
ADCON0.GO = 1;
while(ADCON0.GO);
addata.adb[0] = ADRESL;
addata.adb[1] = ADRESH;
buff += addata.adw;
Delay_ms(2);
}
buff = buff >> 4; //1/16
return buff;
}
void main(void){
CMCON = 0x7; //僐儞僷儗乕僞傪巊傢側偄
OPTION_REG = 0xcf; //Pull-up off WDT 1/128
asm CLRWDT; //僂僆僢僠僪僢僌僋儕傾
GPIO = 0; //慡偰偺弌椡僆僼
TRISIO = 0x29; //擖弌椡愝掕丂
WPU = 0; //撪憼僾儖傾僢僾傪偟側偄
TMR1H = 0xfc; //Timer1 弶婜抣
TMR1L = 0x17; //乮侾侽侽侽僇僂儞僩乯
T1CON = 1; //僞僀儅乕侾愝掕
PIE1.TMR1IE = 1; //Timer1 妱傝崬傒壜
INTCON.PEIE = 1; //廃曈妱傝崬傒壜
INTCON.GIE = 1; //慡妱傝崬傒壜
ad_init();
state = READY;
while(1){
asm CLRWDT;
switch(state){
case READY: //懸婡
LED = 0;
RELAY = 0;
minutes = 0;
set_time = (ulong)ad_conv()*60L*24L/1024L; //MAX 24H(1440暘乯
//set_time = (ulong)ad_conv()*24L/1024L; //MAX 24暘乮僨僶僢僌乯
if(255 == in_sw) state = READYtoRUN;
break;
case READYtoRUN:
if(in_sw)break;
state = RUN;
break;
case RUN: //僞僀儉僇僂儞僩
RELAY = 1;
if(minutes > set_time){
state = RUNtoSTOP;
break;
}
if(255 == in_sw){
state = STOPtoREADY;
break;
}
break;
case RUNtoSTOP:
state = STOP;
break;
case STOP: //僞僀儉傾僢僾
LED =1;
RELAY = 0;
if(255 == in_sw){
state = STOPtoREADY;
break;
}
break;
case STOPtoREADY:
if(in_sw)break;
state = READY;
break;
}
}
}
void interrupt(){ //1mS妱傝崬傒
PIR1.TMR1IF = 0; //妱傝崬傒僼儔僌僋儕傾
TMR1H = 0xfc; //Timer1 弶婜抣
TMR1L = 0x17; //乮侾侽侽侽僇僂儞僩乯
if(state == RUN) m_tics ++;
if(m_tics > 59999){
minutes ++;
m_tics = 0;
}
if(state == RUN){
if(0 == m_tics%500) LED = ~LED; //俴俤俢揰柵
}
if(!SWITCH && in_sw < 255) in_sw ++; //僗僀僢僠俷俶妋掕
if(SWITCH && in_sw > 0) in_sw --; //僗僀僢僠俷俥俥妋掕
}
丂俵倝倠倰倧俠偼嬻偺僾儘僕僃僋僩偑嶌傟傑偣傫丅
丂僾儘僕僃僋僩傪怴婯偵嶌惉偡傞偲僾儘僕僃僋僩柤偲摨偠柤慜偺僜乕僗僼傽僀儖偑帺摦揑偵嶌惉偝傟偰偟傑偄傑偡丅
丂偙偺拞偵main()娭悢偺悧宍偑嶌惉偝傟偰偄傑偡丅
丂暋悢偺僜乕僗僼傽僀儖傪搊榐偡傞帠偼弌棃傑偡偑丄main()娭悢偺婰弎偝傟偨僜乕僗偵椺偊偽main.c偲尵偭偨柤慜傪晅偗傞
偙偲偑弌棃傑偣傫丅
丂巹偼巊偄堈偄僄僨傿僞偱梊傔僜乕僗傪嶌惉偟偰僾儘僕僃僋僩偵捛壛偟偰偄傑偡丅
丂廬偭偰帺摦惗惉偝傟偨僜乕僗僼傽僀儖偵嶌惉偟偨僼傽僀儖傪忋彂偒偟偰偄傑偡丅
丂崱夞丄嵟弶偵價儖僪偟偨偲偒main()娭悢偑掕媊偝傟偰偄側偄偲偄偆僄儔乕偑弌傑偟偨丅
丂僾儘僕僃僋僩傪奐偄偨偲偒僜乕僗僼傽僀儖偑昞帵偝傟偰偄偨偺偱僾儘僕僃僋僩偵搊榐偝傟偰偄傞偲巚偄崬傫偱偄偨偺偱偡偑丄
搊榐偝傟偰偄側偐偭偨偺偱偡丅
丂僾儘僕僃僋僩儅僱乕僕儍乕僞僽傪奐偒丄僜乕僗僼傽僀儖僼僅儖僟傪塃僋儕僢僋偟偰搊榐偟丄價儖僪偡傞帠偑弌棃傑偟偨丅
丂懠偺僄僨傿僞偱僾儘僌儔儉傪嶌惉偟偨偺偱丄偁傑傝婥偵側傜側偐偭偨偺偱偡偑丄僞僽偺摦偒偑曄偱偡丅
丂偙傟偵娭偟偰偼愝掕曽朄偑偁傞傛偆偱丄僱僢僩忋偱夝愢偟偰偄傞儁乕僕傪栚偵偟傑偟偨丅
 |
 |
 |
|---|---|---|
| 僞僀儅乕奜娤 | 僞僀儅乕撪晹 | 廩揹婍傪憰拝 |