


丂夋憸傪僋儕僢僋偡傞偲奼戝昞帵偝傟傑偡丅
丂奼戝夋憸偐傜偼僽儔僂僓偺乽仼栠傞乿儃僞儞偱栠偭偰偔偩偝偄丅
丂撪梕偼僩儔僀傾僢僋傪巊梡偟偨岎棳揹椡惂屼乮埵憡惂屼乯偺幚尡偱偡丅
丂寢壥偑椙偗傟偽働乕僗偵廂傔偰幚梡昳偲偟偰巊梡偡傞偺偱偡偑丄尰忬偱偼栤戣偑偁傝丄拞抐忬懺偵側偭偰偄傑偡丅
丂惉岟偟偨婡婍偼尰暔傕僪僉儏儊儞僩傕巆傞偺偱偡偑丄幐攕偟偨応崌丄尰暔偼晹昳庢傝偝傟丄僪僉儏儊儞僩偼攑婞偝傟丄壗傕巆
傝傑偣傫丅
丂偟偨偑偭偰丄屻乆丄摨偠幐攕傪孞傝曉偡壜擻惈偑偁傝傑偡丅
丂崯張偵婰嵹偟偨撪梕偼帺暘岦偗偺幐攕偺婰榐偱偡偺偱丄偙偺傑傑惢嶌偟偰傕寢壥偼弌傑偣傫丅
丂惢嶌偟偨婡婍偼岎棳婡婍偺揹椡傪惂屼偡傞傕偺偱偡偑丄揹媴傗僸乕僞乕摍偺掞峈晧壸偺応崌偼栤戣側偔摦嶌偟傑偡丅
丂栤戣偼儌乕僞乕晧壸偺応崌丄僩儔僀傾僢僋偺僩儕僈偵幐攕偡傞椞堟偑偁傞偲偄偆偙偲偱偡丅
乮嵟戝弌椡晅嬤丗僛儘僋儘僗億僀儞僩捈屻偺僩儕僈乯
丂埵憡偺偢傟偐丄僩儕僈曽朄偑埆偄偐偺偳偪傜偐偲偼巚偄傑偡偑丄夝寛偟偰偄傑偣傫丅
|
|
|
|
|---|---|---|---|
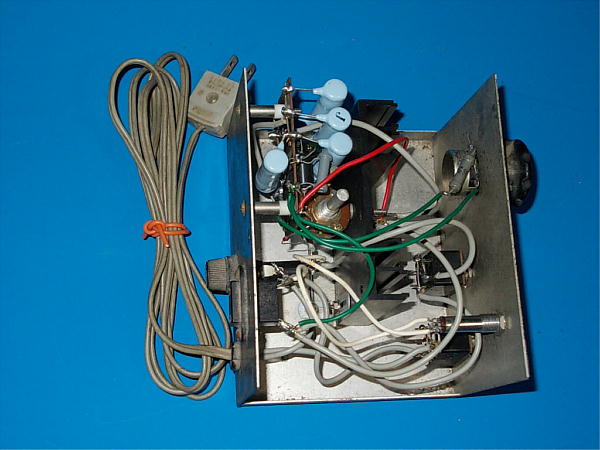
| 挷岝婍 | 撪晹 | 惂屼慺巕 | 愄偺僷僢働乕僕 |
丂挷岝婍偼壗廫擭傕慜偵惢嶌偟偨傕偺偑偁傝丄尰栶偱偡丅
丂摉帪偺俽俠俼傗僩儔僀傾僢僋偼嬥懏僷僢働乕僕偱崅壙偱偟偨丅
丂係侽侽倁侾侽俙偺僩儔僀傾僢僋偼摉帪偺嬥妟偱侾侽侽侽墌埲忋偟傑偟偨丅
丂侾侽俙埲忋偺傕偺偼擖庤偑崲擄偱嬥妟傕丄偐側傝傾僢僾偟傑偟偨丅
丂尰嵼偼僾儔僗僠僢僋僷僢働乕僕偺傕偺偑埨偔擖庤弌棃丄俿俷亅俀俀侽僷僢働乕僕偱係侽俙棳偣偨傝偟傑偡丅
丂偙偺挷岝婍偼侾侽俙偺僩儔僀傾僢僋傪巊梡偟偰偄傞偺偱俇侽侽倂掱搙偟偐惂屼弌棃傑偣傫丅
丒丂侾丏俀俲倂傑偱惂屼偟偨偄丅
丒丂僞僀儅乕傪撪憼偟偨偄丅
丂埲忋丄擇偮偺棟桼偱怴偟偔嶌傞偙偲偵偟傑偟偨丅
丂嶲峫彂傪尒側偑傜夞楬傪峫偊偰傒傑偟偨丅
丂惢嶌偟丄摦嶌傪妋擣偟偨偲偙傠戝偒側岆傝偑偁傝傑偟偨丅
丂夞楬恾傪僋儕僢僋偡傞偲奼戝昞帵偝傟傑偡丅
丂奼戝恾偐傜杮暥偵栠傞偵偼僽儔僂僓偺仼栠傞杢傪巊梡偟偰偔偩偝偄丅

丂惂屼偵偼俹俬俠侾俇俥侾俉俀俁傪巊梡偟傑偟偨丅
丂侽僋儘僗億僀儞僩傪専弌偟丄僩儕僈偡傞僞僀儈儞僌傪僞僀儅乕偱愝掕偟傑偡丅
丂慡攇惍棳攇宍傪撪憼僐儞僷儗乕僞偵擖椡偟丄侽倁偐傜棫偪忋偑偭偨弖娫乮僐儞僷儗乕僞偱偼弌椡偺棫偪壓偑傝乯偵妱傝崬傒傪
偐偗傑偡丅
丂妱傝崬傒儖乕僠儞偱偼僞僀儅乕侾偵抶傟帪娫傪愝掕偟偰婲摦偟傑偡丅
丂僞僀儅乕侾偺妱傝崬傒儖乕僠儞偱偼僩儔僀傾僢僋偺僩儕僈僷儖僗傪抁帪娫弌椡偟傑偡丅
丂摉抧偱偼俇侽俫倸偱偡偺偱侾昩娫偵侾俀侽夞偺侽僋儘僗億僀儞僩偑偁傝丄妱傝崬傒廃婜偼俉丏俁俁倣俽偲側傝傑偡丅
丂堦楢偺摦嶌偼侽僋儘僗偺妱傝崬傒廃婜撪偵姰寢偟側偗傟偽側傝傑偣傫丅
丂懡彮丄梋桾傪帩偭偰丄俉倣俽傪嵟戝偺抶傟帪娫偲偟偰偄傑偡丅
丂弌椡挷惍偺暘夝擻偼俉價僢僩乮俀俆俇僗僥僢僾乯偲偟傑偡偑丄侽倶俥埲壓偼侽丄侽倶俥侽埲忋偼侾侽侽亾偲偟偰偄傑偡丅
丂俉侽侽侽倳俽傪俀俆俇偱妱傞偲俁侾丏俀俆倳俽偑侾僗僥僢僾偺抶傟帪娫偲側傝傑偡丅
丂俹俬俠偼侾俇俵俫倸偺撪晹敪怳偱摦嶌偟偰偄傑偡偺偱僞僀儅乕侾偺僋儘僢僋廃婜偼侽丏俀俆倳俽偲側傝傑偡丅
丂俁侾丏俀俆亐侽丏俀俆亖侾俀俆偑侾僗僥僢僾偺僇僂儞僩悢偲側傝傑偡丅
丂僩儕僈僞僀儈儞僌偼揹尮揹埑傪倁俼偱暘埑偟俙俢曄姺偟偰偄傑偡丅
丂俙俢曄姺抣傪俉倐倝倲偵娵傔偰俀俆俇僗僥僢僾偲偟偰偄傑偡丅
丂廗姷偱侾侽倐倝倲偺俙俢曄姺抣傪俀倐倝倲塃僔僼僩偟傑偟偨偑嵍媗偟偰崅埵懁儗僕僗僞傪撉傔偽娙扨偱偟偨丅
丂僩儔僀傾僢僋偺僩儕僈偼僼僅僩僩儔僀傾僢僋傪巊偊偽娙扨偱偡偑丄庤帩偪偵柍偄偺偱僷儖僗僩儔儞僗傪巊偄傑偟偨丅
丂僷儖僗僩儔儞僗偼壗廫擭傕慜偵峸擖偟偨僕儍儞僋婎斅偐傜庢傝奜偟偨俽俥俀俙傪巊偄傑偟偨丅
丂僷儖僗僩儔儞僗偼巊偄曽偑傛偔敾傜側偄偺偱偡偑俹倂俵儌僕儏乕儖偱俆俲俫倸傪忢偵敪怳偝偣丄僎乕僩僞僀儈儞僌傪
俹俶俹僩儔儞僕僗僞偱嶌偭偰偄傑偡丅
丂巊梡帪娫僞僀儅乕偼侽僋儘僗妱傝崬傒偺夞悢傪僇僂儞僩偟偰偄傑偡丅
丂愝掕偼倁俼偺暘埑揹埑傪俙俢曄姺偟偰偄傑偡丅
丂曄姺抣傪侾俇僗僥僢僾偵娵傔丄嵟抁俁侽暘丄嵟挿俉帪娫偵偟偰偄傑偡丅乮俁侽暘僗僥僢僾乯
丂僗僞乕僩乛僗僩僢僾偼侾偮偺墴偟杢偱峴偄傑偡丅
丂俙俠懁偺揹尮僗僀僢僠傪擖傟傞偲揹尮昞帵俴俤俢偑揰柵偡傞偺偱墴偟杢傪墴偡偲惂屼偑奐巒偟丄揹尮昞帵摂偼楢懕揰摂偲
側傝傑偡丅
丂巊梡帪娫僞僀儅乕愝掕倁俼偼僗僞乕帪偺抣傪撉傒崬傒丄僗僞乕僩屻偼曄峏傪庴晅傑偣傫丅
丂弌椡挷惍倁俼偼摦嶌拞偺曄峏傪忢偵庴偗晅偗傑偡丅
丂弌椡昞帵摂偼弌椡愝掕偵傛傝柧傞偝偑曄壔偟傑偡丅
丂僕儍儞僷乕僺儞偼僞僀儅乕傪嶦偡傕偺偲俆侽俫倸俇侽俫倸傪愗傝姺偊傞傕偺偱偡丅
丂偨偩偟丄摉抧偱偼俆侽俫倸偼摦嶌傪妋擣弌棃傑偣傫丅
丂幐攕偟偨棟桼偼揹尮僩儔儞僗傪働僠偭偨帠偵偁傝傑偟偨丅
丂侽僋儘僗億僀儞僩偼僩儔儞僗儗僗偺惂屼揹尮傪慡攇惍棳偟偰偄傑偡偑丄僐儞僨儞僒乕偱揹埑傪棊偲偟偰偄傞偨傔庡揹尮偐傜
埵憡偑偢傟偰偄傑偡丅
丂嵟弶丄僩儔僀傾僢僋傪愙懕偣偢惂屼夞楬偩偗偱摦嶌妋擣偟偰偄偨偺偱庡揹尮偲偺埵憡偺偢傟偵婥偑晅偒傑偣傫偱偟偨丅
丂惂屼夞楬偺摦嶌偩偗傪尒偰偄傞偲惓忢偵摦嶌偟偰偄傞傛偆偵尒偊傑偡丅
丂僩儔僀傾僢僋偲晧壸傪愙懕偟偰婥偑晅偒傑偟偨丅
丂惂屼夞楬偺僩儔儞僗儗僗傪巭傔偰僩儔儞僗傪巊偄傑偟偨丅
丂僩儔儞僗偺俀師懁偺揹埑攇宍偑庒姳丄榗傓傛偆側婥偑偟偨偺偱丄侽僋儘僗偺専弌傪僼僅僩僇僾儔偵偟傑偟偨丅
丂僼僅僩僇僾儔偵偡傞側傜僩儔儞僗儗僗偺傑傑偱傕椙偐偭偨傛偆側婥偑偟傑偡丅
丂夞楬恾傪僋儕僢僋偡傞偲奼戝昞帵偝傟傑偡丅
丂奼戝恾偐傜杮暥偵栠傞偵偼僽儔僂僓偺仼栠傞杢傪巊梡偟偰偔偩偝偄丅
丂僼僅僩僇僾儔傪巊偭偰俙俠擖椡揹埑偺侽僋儘僗億僀儞僩傪専弌偟偰偄傑偡偑摦嶌偼摨偠偱丄摨偠僾儘僌儔儉傪巊偭偰偄傑偡丅
//////////////////////////////////////
// 俙俠揹椡惂屼(acpwctl1.c) //
// 2014/06/13 PIC16F1823 //
// MikroC Pro for PIC Ver 6.0.0 //
//////////////////////////////////////
//OSC=INTOSC, Watchdog controlled by SWDTEN bit, PowerUpTimer=ON, MCLR=ON, Code Protection=OFF,
//Data Protection=OFF,Brown-out Reset=ON, Clock out=OFF, I/E Switch over=off,
//Fail-Safe Clock Monitor Enable=OFF,Flash Memory Self Write Protection=OFF, PLL=OFF,
//Stack OF/UF Reset=ON, Brown-out=H-Volt,Incircuit Debug=OFF, LVP=OFF
typedef unsigned char uchar;
typedef unsigned int uint;
typedef unsigned long ulong;
typedef union{
uint da16;
uchar da8[2];
}WDATA;
WDATA addata; //A/D曄姺抣
WDATA t1set; //僞僀儅乕侾愝掕抣
volatile long remain; //巆傝帪娫僇僂儞僞
uint t_set30; //俁侽暘扨埵偺愝掕抣
uint hz; //廃攇悢
uint p_rate; //暘夝擻偁偨傝偺僇僂儞僩悢
volatile uint p_out; //埵憡嵎
uint adconv(){ //A/D曄姺乮16夞偺暯嬒乯
int i;
uint adbuff;
adbuff = 0;
for(i=0; i<16; i++){
ADCON0.GO = 1;
while(ADCON0.GO);
addata.da8[0] = ADRESL;
addata.da8[1] = ADRESH;
adbuff += addata.da16;
}
adbuff += 8; //妱傞悢偺1/2傪壛偊傞
adbuff = adbuff >> 4; // /16;
return adbuff;
}
void main() { //儊僀儞儖乕僠儞
int temp;
OSCCON = 0x7a; //撪晹 16MHz
FVRCON = 0x84; //DACREF=1.024V
DACCON0 = 0x88; //DAC ON FVR2
DACCON1 = 0x7; //DAC Level
TRISA = 0x3f; //all input
ANSELA = 0x3; //AN0,AN1
WPUA = 0; //PULL UP Disable
LATC = 0x10; //Output Level
TRISC = 0x2; //C1 input
ANSELC = 0; //all Digital
WPUC = 0; //PULL UP Disable
WDTCON = 0x15; //僂僆僢僠僪僢僌1S
asm CLRWDT; //WDT CLR
if(PORTA.B2){
hz = 60; //60Hz
p_rate = 125;
}
else {
hz = 50; //50Hz
p_rate = 150;
}
while(1){
asm CLRWDT;
LATC.B2 = ~LATC.B2; //揹尮昞帵揰柵
if(!PORTA.B5) temp = 1; //ON/OFF杢
else temp = 0;
Delay_ms(200);
if(temp && !PORTA.B5) break;
else temp = 0;
}
while(1){ //墴杢俷俥俥妋擣
asm CLRWDT;
if(PORTA.B5) temp = 1;
else temp = 0;
Delay_ms(50);
if(temp && PORTA.B5) break;
else temp = 0;
}
CCP1CON = 0x0c; //PWM P1A ACTIVE H
PR2 = 49; //僒僀僋儖僞僀儉(49+1) x 0.0625 x 4uS x 16 = 200uS
CCPR1L = 25; //僨儏乕僥傿乕 25 x 0.0625uS x 4 x 16 傪僙僢僩
T2CON = 0x6; //T2 ON 僾儕僗働乕儔乕1/16
T1CON = 0x1; //T1 ON
CM1CON0 = 0x86; //Comparator Enable,higher speed,hysteresis enable
CM1CON1 = 0x51; //INT -,DAC VOLTAGE Reference,C12in1
ADCON0 = 0x01; //CH0 AD ON
ADCON1 = 0xa0; //塃媗傔丄Fosc/32 REFF=V+
asm CLRWDT;
t_set30 = 1 + (adconv() >> 6); //帪娫愝掕乮侾俇僗僥僢僾乯
remain = (long)hz*60L*60L*(long)t_set30; //巆傝帪娫傪寁嶼
ADCON0 = 0x05; //CH1 AD ON
p_out = 0xff - (adconv() >> 2); //埵憡抶傟乮俀俆俇僗僥僢僾乯
t1set.da16 = 0xffff - p_out*p_rate; //僞僀儅乕侾愝掕抣
TMR1L = 0;
TMR1H = t1set.da8[1];
TMR1L = t1set.da8[0];
INTCON = 0xc0; //僌儘乕僶儖妱傝崬傒丄廃曈妱傝崬傒嫋壜
PIE2.C1IE = 1; //僐儞僷儗乕僞妱傝崬傒嫋壜
LATC.B2 = 1; //揹尮昞帵
while(1){
asm CLRWDT;
if(!PORTA.B5) temp = 1; //ON/OFF杢
else temp = 0;
p_out = 0xff - (adconv() >> 2); //埵憡抶傟乮俀俆俇僗僥僢僾乯
PIE2.C1IE = 0;
t1set.da16 = 0xffff - p_out*p_rate; //僞僀儅乕侾愝掕抣
PIE2.C1IE = 1;
Delay_ms(50);
if(remain < 1)break; //僞僀儉傾僢僾
if(!PORTA.B5 && temp) break; //嫮惂廔椆
else temp = 0;
}
while(1){ //墴杢俷俥俥妋擣
asm CLRWDT;
if(remain < 1) break;
if(PORTA.B5) temp = 1;
else temp = 0;
Delay_ms(50);
if(temp && PORTA.B5) break;
else temp = 0;
}
INTCON = 0; //廔椆張棟
T1CON = 0;
T2CON = 0;
LATC = 0x10;
while(1); //倂俢俿偱儕僙僢僩
}
void interrupt(){
if(PIR2.C1IF){ //C1妱傝崬傒
PIR2.C1IF = 0; //妱傝崬傒僼儔僌僋儕傾
if(remain > 0 && PORTA.B4)remain--; //巆傝帪娫傪亅
TMR1L = 0;
TMR1H = t1set.da8[1]; //僞僀儅乕抣僙僢僩
TMR1L = t1set.da8[0];
if(p_out < 0x10)LATC.B3 = 1; //埵憡抶傟偑彫偝偄帪丄弌椡昞帵俷俶
else LATC.B3 = 0; //偦傟埲奜偼弌椡昞帵俷俥俥
PIE1.TMR1IE = 1; //T1妱傝崬傒嫋壜
}
if(PIR1.TMR1IF){ //T1妱傝崬傒
PIR1.TMR1IF = 0; //妱傝崬傒僼儔僌僋儕傾
PIE1.TMR1IE = 0; //T1妱傝崬傒嬛巭
if(p_out > 0xf0); //埵憡抶傟偑戝偒偄帪偼壗傕偟側偄
else{
LATC.B3 = 1; //弌椡昞帵俷俶
LATC.B4 = 0; //僎乕僩僷儖僗俷俶
Delay_us(200); //僎乕僩帪娫
}
if(p_out < 0x10); //埵憡抶傟偑彫偝偄偲偒偼壗傕偟側偄
else LATC.B4 = 1; //僎乕僩僷儖僗俷俥俥
}
}
 |
 |
 |
|---|---|---|
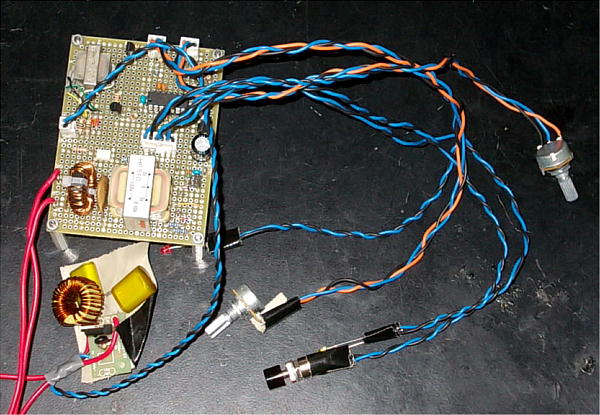
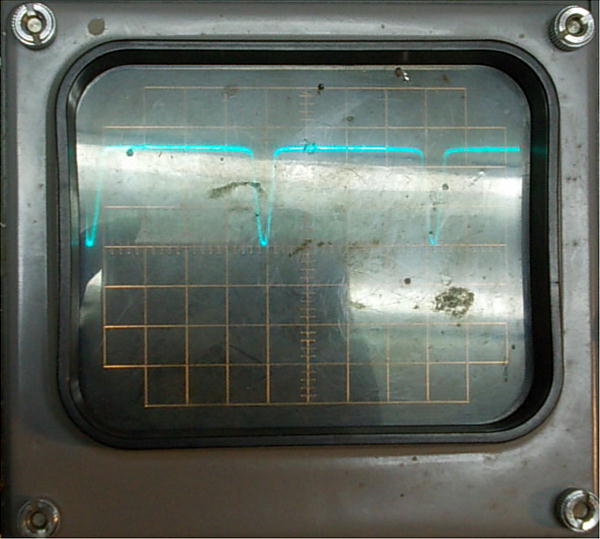
| 幚尡夞楬 | 侽僋儘僗攇宍 | 晧壸揹棳 |
丂摦嶌帋尡傪峴偄傑偟偨偑丄慜弎偟偨傛偆偵姰帏偱偼偁傝傑偣傫丅
丂攇宍偼揹媴傪晧壸偵偟偨帪偺傕偺偱丄掞峈晧壸偺応崌偼栤戣偁傝傑偣傫丅
丂侽僋儘僗攇宍偼俹俬俠撪憼偺僐儞僷儗乕僞偵擖椡偟偰妱傝崬傒僞僀儈儞僌傪嶌傝傑偡丅
丂晧壸揹棳偼揹尮儔僀儞偵捠偟偨僇儗儞僩僩儔儞僗偺晧壸掞峈偺抂巕揹埑傪昞帵偟偰偄傑偡丅
丂乮揹棳寁應梡偺僇儗儞僩僩儔儞僗偼夞楬恾偵偼婰擖偝傟偰偄傑偣傫丅乯
丂僆僔儘偑擭戙暔偺億儞僐僣偱偡偺偱嵟弶偺挷岝婍傪惢嶌偟偨帪戙偺幨恀偲巚傢傟偦偆偱偡偑丄嵟怴偺幚尡偱偡丅
丂乮摉帪偼僨僕僞儖僇儊儔偑柍偐偭偨偺偱婥寉偵攇宍幨恀偼嶣傟傑偣傫丅乯
丂偲傝偁偊偢僩儕僈曽朄傪曄偊偰傒傑偡丅
丂尰嵼丄廐寧偵僼僅僩僩儔僀傾僢僋傪拲暥拞偱偡丅
丂偦傟偱傕僟儊側傜俢俬俙俠傗俽俛俽偵傛傞僩儕僈偵栠偟丄僞僀儅乕偺傒俹俬俠偱惂屼偟傑偡丅
丂偲偵偐偔丄埨掕偵摦嶌偟丄幚嵺偵巊偊傞暔傪嶌傞偺偑栚揑偱偡丅
丂働乕僗偵廂擺偟偰巊偄堈偔偡傞偙偲傕戝愗偱偡丅
 |
 |
|---|---|
| 嶲峫彂侾 | 嶲峫彂俀 |
丂拲暥偟偨僼僅僩僩儔僀傾僢僋偑擖偭偨偺偱夞楬傪廋惓偟偰傒傑偟偨丅
丂偲傝偁偊偢僾儘僌儔儉偼埲慜偺傑傑偱帋偟偰傒傑偟偨丅
丂俹倂俵傕埲慜偺傑傑摦嶌偟偰偄傑偡偑丄夞楬偑奜偝傟偰偟傑偭偨偺偱柍懯偵摦嶌偟偰偄傑偡丅
丂寢壥偲偟偰慡懱偺摦嶌偼慡偔慜偲曄傢傝傑偣傫偱偟偨丅
丂揹媴偺傛偆側掞峈晧壸偱偼僗儉乕僘偵摦嶌偡傞偺偱偡偑丄儌乕僞乕晧壸偱偼丄摦嶌偡傞敜偺椞堟偺堦晹偱巭傑偭偰
偟傑偄傑偡丅
丂揹棳攇宍傪娤嶡偡傞偲岎棳偺曅懁偺敿廃婜偱僩儕僈偵幐攕偟偰偄傞傛偆偱偡偑丄尨場偑敾傝傑偣傫丅
丂僾儘僌儔儉傪廋惓偟偨傝偟偰傕夵慞偟傑偣傫偱偟偨丅
丂儌乕僞乕晧壸偲偟偰偼愵晽婡傪巊偄傑偟偨丅
丂埲慜惢嶌偟偨挷岝婍偱偼愵晽婡偺夞揮悢傪曄懍弌棃偰偄傑偟偨丅
丂愵晽婡偼儌乕僞乕偲儊僇僯僇儖僗僀僢僠偩偗偺傕偺偟偐巊偊傑偣傫丅
丂嵟嬤偺崅媺側愵晽婡偼揹巕夞楬偑慻傒崬傑傟偰偄傞偺偱懯栚偱偡丅